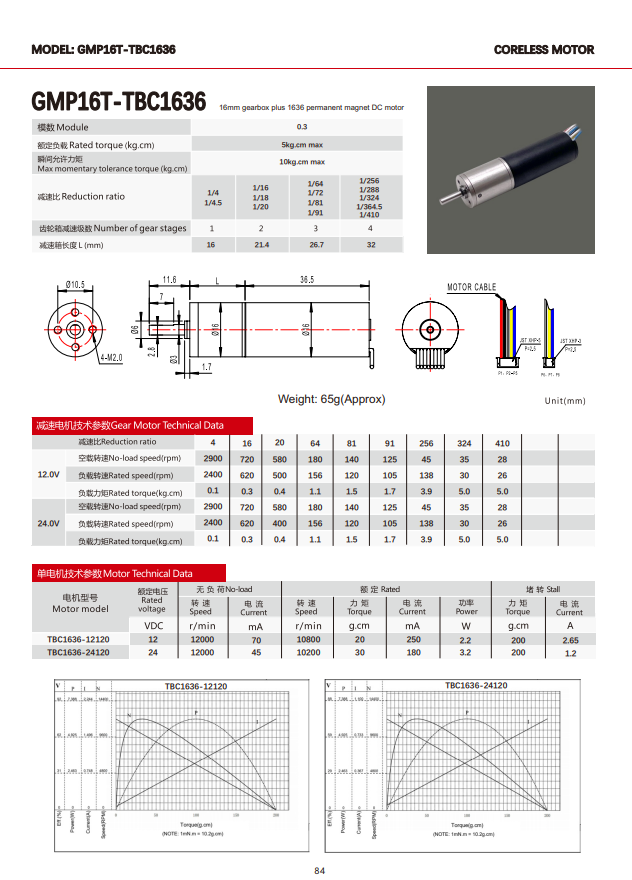
GMP16T-TBC1636 300mNm 12V 24V 16mm Motor Coreless Brushless DC Motor fún Àwọn Ẹ̀rọ Ìṣègùn Faulhaber Maxon Replacement Motor





1. Lilo agbara ati fifipamọ agbara giga, oṣuwọn iyipada agbara kọja 90%
A lo apẹrẹ ago alailopin ti ko ni ipilẹ lati yọkuro pipadanu eddy current ati hysteresis patapata, ati pe agbara iyipada agbara le de ju 90% lọ, eyiti o dinku lilo agbara ni pataki ati pe o dara fun awọn ohun elo iṣoogun ti o nilo lati ṣiṣẹ fun igba pipẹ.
Ìmọ̀ ẹ̀rọ tí kò ní brush ń dín ìfọ́pọ̀ àti ìpàdánù brush kù síwájú sí i, ó ń mú kí agbára ṣiṣẹ́ dáadáa, ó ń ṣètìlẹ́yìn fún ìtẹ̀síwájú fólítì 12V/24V, ó ń bá àwọn bátírì lítíọ́mù tàbí àwọn ìpèsè agbára tí a ti mú fólítì dúró, ó sì ń dáhùn padà sí àwọn ipò agbára tí ó yàtọ̀ síra.
2. Idahun agbara giga ati iṣakoso deede
Ìfàsẹ́yìn rotor kéré gan-an (ìfàsẹ́yìn ìfàsẹ́yìn jẹ́ 1/3 ti àwọn mọ́tò ìbílẹ̀ nìkan), ìfàsẹ́yìn àkókò ẹ̀rọ náà kéré tó 10 milliseconds, ó ń ṣe àtìlẹ́yìn fún ìbẹ̀rẹ̀ àti ìdádúró àti ìyípadà ẹrù lẹ́sẹ̀kẹsẹ̀, ó sì ń bá àwọn ohun èlò ìṣègùn mu (bíi àwọn ìsopọ̀ robot iṣẹ́-abẹ, àwọn páǹpù abẹ́rẹ́ kékeré)
Ni idapọ pẹlu imọ-ẹrọ iṣipopada itanna, o ṣe atilẹyin fun ilana iyara PWM ati iṣakoso pipade-loop, o ni iṣẹ ṣiṣe ilana iyara laini ti o tayọ, ati iyipada iyipo kere ju 2% lọ, eyiti o dara fun ilana sisan deedee giga tabi iṣakoso ipo
3. Ariwo ati gbigbọn ti o kere pupọ
Kò sí ìfọ́mọ́ra brush àti commutator, ìdènà elektróòjìnnì tí ó kéré gan-an (EMI), àti ariwo ìṣiṣẹ́ <40dB, èyí tí ó yẹ fún àwọn àyíká ìṣègùn (bíi àwọn monitor, àwọn ẹ̀rọ apnea oorun) àti àwọn ipò ilé (bíi àwọn ohun èlò ìfọwọ́ra, àwọn ohun èlò ìfọwọ́ra iná mànàmáná) pẹ̀lú àwọn ohun tí a béèrè fún ìdákẹ́jẹ́ẹ́.
4. Apẹrẹ kekere ati fẹẹrẹfẹ
Iwọn ila opin kekere 16mm, iwuwo fẹẹrẹ, iwuwo agbara giga, o fi aaye pamọ fun awọn ohun elo, paapaa o dara fun awọn irinṣẹ iṣoogun ti o ṣee gbe (bii awọn ayẹwo olutirasandi ti a fi ọwọ mu) tabi awọn modulu awakọ robot kekere
5. Igbesi aye gigun ati igbẹkẹle giga
Apẹrẹ alailopin naa yẹra fun wiwọ fẹlẹ, ati pẹlu awọn beari ti ko ni agbara lati wọ ati awọn apoti gear irin, igbesi aye le de ẹgbẹẹgbẹrun awọn wakati, ni ibamu pẹlu awọn ibeere iduroṣinṣin giga ti awọn ohun elo iṣoogun. Diẹ ninu awọn awoṣe ṣe atilẹyin ipele aabo IP44, ko ni eruku ati omi, o dara fun awọn agbegbe tutu tabi eruku.
1. Ijade iyipo giga ati ibiti iyara jakejado
Ìyípo tí a fún ní ìwọ̀n jẹ́ 300mNm, ìyípo tí ó ga jùlọ lè dé 450mNm, pẹ̀lú àpótí ìdìpọ̀ pílánẹ́ẹ̀tì (a lè ṣe àtúnṣe ìpíndọ́gba ìdínkù), ìjáde ìyípo gíga oníyàrá kékeré (bíi fífọ àwọn ohun èlò iṣẹ́ abẹ dáadáa) tàbí iṣẹ́ ìdúróṣinṣin oníyàrá gíga (bíi centrifuge)
Iyàrá iyára itanna jẹ́ 1:1000, ó ń ṣe àtìlẹ́yìn fún ìyípadà ọ̀pọ̀lọpọ̀ ìṣẹ̀lẹ̀ láti iyàrá iyára iyára iyára iyára sí iyàrá iyára ...
2. Àwọn àǹfààní ìmọ̀-ẹ̀rọ tí kò ní brush
Ìmọ̀ ẹ̀rọ ìyípadà ẹ̀rọ itanna ń mú kí àwọn iná àti ìdènà ẹ̀rọ itanna kúrò, ó ń gba ìwé-ẹ̀rí EMC ìpele ìṣègùn, ó sì ń rí i dájú pé ó bá àwọn ẹ̀rọ itanna onímọ̀ràn mu (bíi àwọn ohun èlò MRI)
Moto alafẹnuje n ṣe atilẹyin fun encoder oofa tabi esi sensọ Hall lati ṣaṣeyọri iṣakoso pipade-loop, ipo deede ti ± 0.01°, o dara fun awọn ohun elo adaṣiṣẹ (bii eto idari endoscope)
3. Ìtújáde ooru àti ìṣàkóṣo iwọn otutu tó dára jùlọ
Afẹ́fẹ́ tó ń ṣàn lórí àwọn ojú inú àti òde ti ìṣètò ago tó wà nínú rẹ̀ mú kí ooru máa tú jáde, àti pẹ̀lú irin magnetic tó ní agbára gíga àti ikarahun tó ń darí ooru, a dín ìgbóná náà kù ní 30% ní ìfiwéra pẹ̀lú àwọn mọ́tò ìbílẹ̀, èyí tó ń mú kí iṣẹ́ rẹ̀ dúró ṣinṣin ní àwọn àyíká igbóná gíga (bíi àwọn ẹ̀rọ ìpara)
1. Pápá ohun èlò ìṣègùn
Ohun elo ayẹwo: apa gbigbe ayẹwo ti oluyẹwo kemikali, awakọ isẹpo endoscope rotary
Àwọn ohun èlò ìtọ́jú: Mọ́dù abẹ́rẹ́ tó péye ti fifa insulin, orí agbára ìdáná eyín, robot iṣẹ́-abẹ, ìsopọ̀ ọwọ́ oníṣẹ́-abẹ (robot kan ṣoṣo nílò àwọn ẹ̀rọ 12-20 ihò ago)
Ètò àtìlẹ́yìn ìgbésí ayé: awakọ̀ turbine atẹ́gùn, fifa oximeter micro
2. Ile ọlọgbọn ati itọju ara ẹni
Itọju ilera: ibọn ifọwọra module gbigbọn igbohunsafẹfẹ giga, awakọ abẹfẹlẹ fifa ina mọnamọna
Àwọn ohun èlò ilé tó gbọ́n: robot tó gbámúṣé, àwọn aṣọ ìkélé tó gbọ́n
3. Àdánidá àti àwọn rọ́bọ́ọ̀tì ilé iṣẹ́
Ẹ̀rọ ìṣàyẹ̀wò: AGV guide wheel drive, micro robot joints (bíi humanoid robot finger actuators)
Ohun elo wiwa: atunṣe idojukọ iboju opitika, iṣakoso gripper laini iṣelọpọ adaṣe
4. Àwọn pápá tó ń yọjú
Awọn ẹrọ itanna onibara: drone servo, iṣakoso zoom gimbal
Awọn ọkọ ayọkẹlẹ agbara tuntun: atunṣe damper afẹfẹ inu ọkọ ayọkẹlẹ, awakọ afẹfẹ itutu batiri